QAC Automotive and Robotics (QAaR) Quality Assurance
FOCUSED ON THE FUTURE
Welcome to the third edition of the QAaR newsletter. In this edition, we’ll focus on sharing more information about automotive technology and current projects the QAC team is working on. The QAC team has been working on creating new testing solutions for robotics, small vehicles, autonomous and connected vehicles system integration testing, and ISO-26262 compliance verification.
Keeping you informed
Our automotive and robotics quality assurance workstreams
Automotive system integration testing (sit) framework
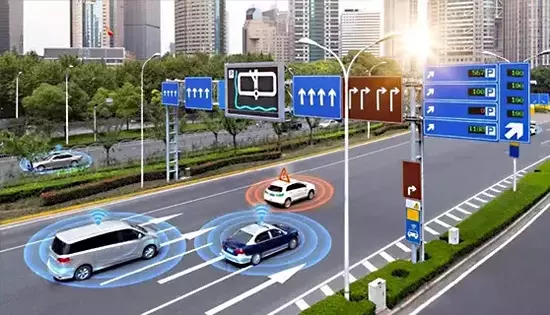
A few years ago, collision and lane change avoidance technology was primitive. Nowadays, the technology has been updated with advanced drive assistance systems (ADAS). These new systems introduced new design and test challenges. Modern ADAS architecture combines complex sensing, processing, and algorithmic technologies into what will ultimately become the guts of autonomous vehicles. As ADAS evolve from simple collision-avoidance systems to fully autonomous vehicles, they demand sensing and computing technologies that are complex. This need creates demand for quality assurance and testing techniques. In particular, hardware-in-the-loop (HIL) test methods have been adapted to ADAS setups, with the purpose of using real sensors to emulate ECMs and generate actuator control signals.
OCE 29920 project
QAC is preparing for the future of automated and connected vehicles through research and testing. Advanced systems like autonomous vehicles are quickly rewriting the rules for how test and measurement equipment vendors must design instrumentation. In the past, test software was merely a mechanism to communicate a gauged result or measure voltage levels. Now, test software is the technology that allows engineers to construct increasingly complex measurement systems capable of characterizing everything from the simplest components to comprehensive autonomous vehicle simulation.
How the hardware-in-the-loop automotive system integration testing framework works
QAC Automotive System Integration Testing Framework
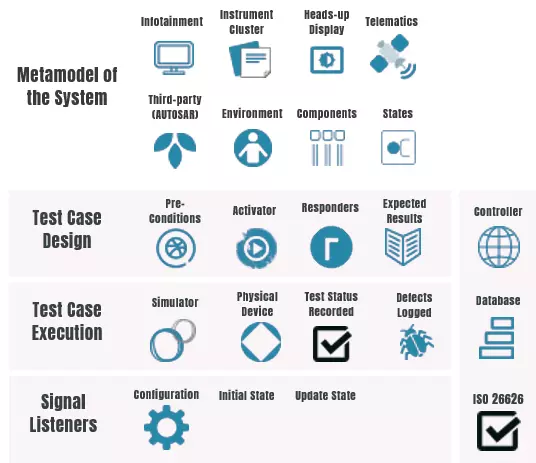
- Independent of infotainment operating System architecture and versions (independent of AGL, QNX or any other OS)
- Automotive HIL test framework focused on system integration testing across vehicle architecture pillars (infotainment, instrument cluster, heads-up display, telematics, and AUTOSAR)
- Verification of all devices and components, part of the automotive ecosystem and test scenario being validated, ensuring they work together properly
- Connectivity testing for head units, IoT components, and devices in a vehicle
- An automated process to prioritize automotive test cases according to ISO 26262 guidelines, based on ASIL levels, and focus on high risk test execution scenarios
- Easy to edit and maintain test case adaptability while adding components and creating new listeners for specific products and vehicles
Robotics and small autonomous and connected (a/c) vehicles automation testing
WHAT
- Test Framework for robotic and small vehicles testing
It’s crucial to develop reliable systems that allow robots to be instrumental to users. Robots and small A/C vehicles require quality assurance testing to validate system functionality. Such testing provides confidence that a system will perform as expected. It also allows for a tester to understand the weaknesses, problems, and user constraints. Testing robotic systems differs from many other applications due to the complexity of hardware, software, and the fact that robots and small A/C vehicles have many degrees of motion. These robots are made of delicate moving components, dynamic affects, and multiple sensors. Unlike humans, robots can work in extreme and inhospitable environments and be exposed to extreme temperature, physical shocks, radiation, and hostile people.
-
Robot Operating System – ROS
ROS is an open-source, meta-operating system that controls a robot and provides the services similar to an operating system, including hardware abstraction, low-level device control, implementation of commonly-used functionality, message-passing between processes, and package management. -
Gazebo
Gazebo is a well-designed robot simulator that makes possible to rapidly test algorithms, design robots, perform regression testing, and train AI system using realistic scenarios. It can simulate populations of robots in complex indoor and outdoor environments.
Our robotics and small A/C vehicles testing solution
QAC has developed an exclusive automated scalable model-based test framework to design and execute robotics and small A/C vehicles testing. This cloud based test automation framework is built using ROS and Gazebo technologies.
-
Automated Test Case Design
Using Model-Based testing, all test cases are generated automatically by the framework. With this approach, it’s possible to measure test case coverage. This model allows for easy updates and maintenance and even handles high variability of requirements to prioritize test cases. -
Test Case Execution
In the Gazebo simulator, the generated test cases are automatically parsed to spawn the required models. Test termination (both success and failure) are identified automatically and the results are logged. Since test configurations are recorded, failure cases can be easily rerun and analyzed further.

Picture shows an example of indoor testing environment with humans and inanimate obstacles
-
Test Case Scenarios Coverage and Capabilities
It’s possible to set multiple goal points to test the pathplanner such as static and dynamic obstacles to check obstacle avoidance. Obstacles are placed on the robot’s path to ensure an encounter with the robot and test obstacle avoidance and detection. This type of test includes human-like obstacles with closed-loop human-like trajectories. The test also challenges the robot’s capabilities testing sensor disturbances due to external or internal interferences. This is done by modifying each sensor, simulating electromagnetic interference and the sensors’ field-of-view, cameras, 2D/3D lidars, and many environmental situations. -
ISO 26262 for small road vehicles
QA Consultants has developed an automated process that can prioritize small road vehicles test cases according to ISO 26262 guidelines. This process represents high safety risks based on ASIL levels and focused test execution scenarios. -
Cloud Based Simulation Server
The generated test cases are automatically parsed to spawn the required models in the Gazebo simulator. Test termination (both success and failure) are identified automatically and the results are logged. Since test configurations are recorded, failure cases can be easily rerun and analyzed further.
STAY TUNED
Our partners: